Meccanismi cedevoli: sfruttare la flessione
I compliant mechanisms (o meccanismi cedevoli) sono sistemi meccanici progettati per sfruttare i vantaggi della deformazione. Questa tecnologia ha generato recentemente molto interesse, essendo risultata vantaggiosa in alcuni campi applicativi.
Definizione di meccanismo
In generale, un meccanismo è un dispositivo meccanico in grado di trasferire movimento e forze (e quindi potenza). La maggior parte dei meccanismi prevede l’utilizzo di componenti idealmente non soggette a nessun tipo di flessione. Il movimento viene trasmesso tramite parti rigide (cerniere, guide, ingranaggi e altro) con gradi di libertà definiti; eventuali vincoli di natura elastica sono accorpati alla struttura impiegando componenti aggiuntive dedicate.
I meccanismi cedevoli
I compliant mechanisms, al contrario dei normali meccanismi, trasmettono il movimento flettendo le loro parti in modo controllato. Grazie all’utilizzo di materiali capaci di sopportare deformazioni considerevoli e ripetute nel tempo senza incorrere in rotture, questi meccanismi possono trasmettere movimento pur non avendo formalmente gradi completi di libertà (o comunque avendo meno gradi di libertà di quanti ne servirebbero per trasmettere lo stesso movimento con un meccanismo non cedevole). In generale i materiali più utilizzati sono plastica dura e metalli molto resistenti come il titanio; a seconda dell’applicazione specifica vengono anche utilizzati altre tipologie di materiali con buone proprietà elastiche.
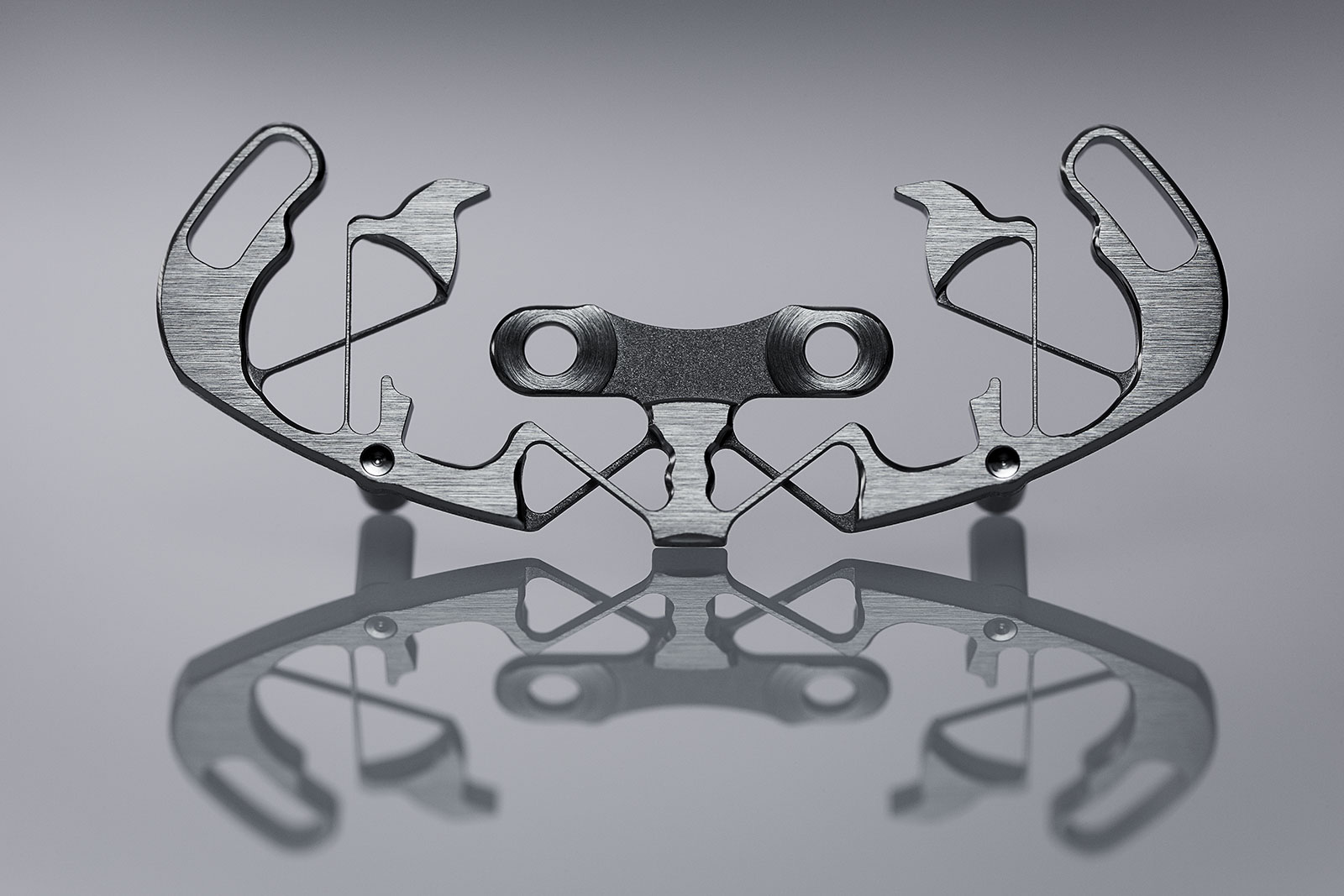
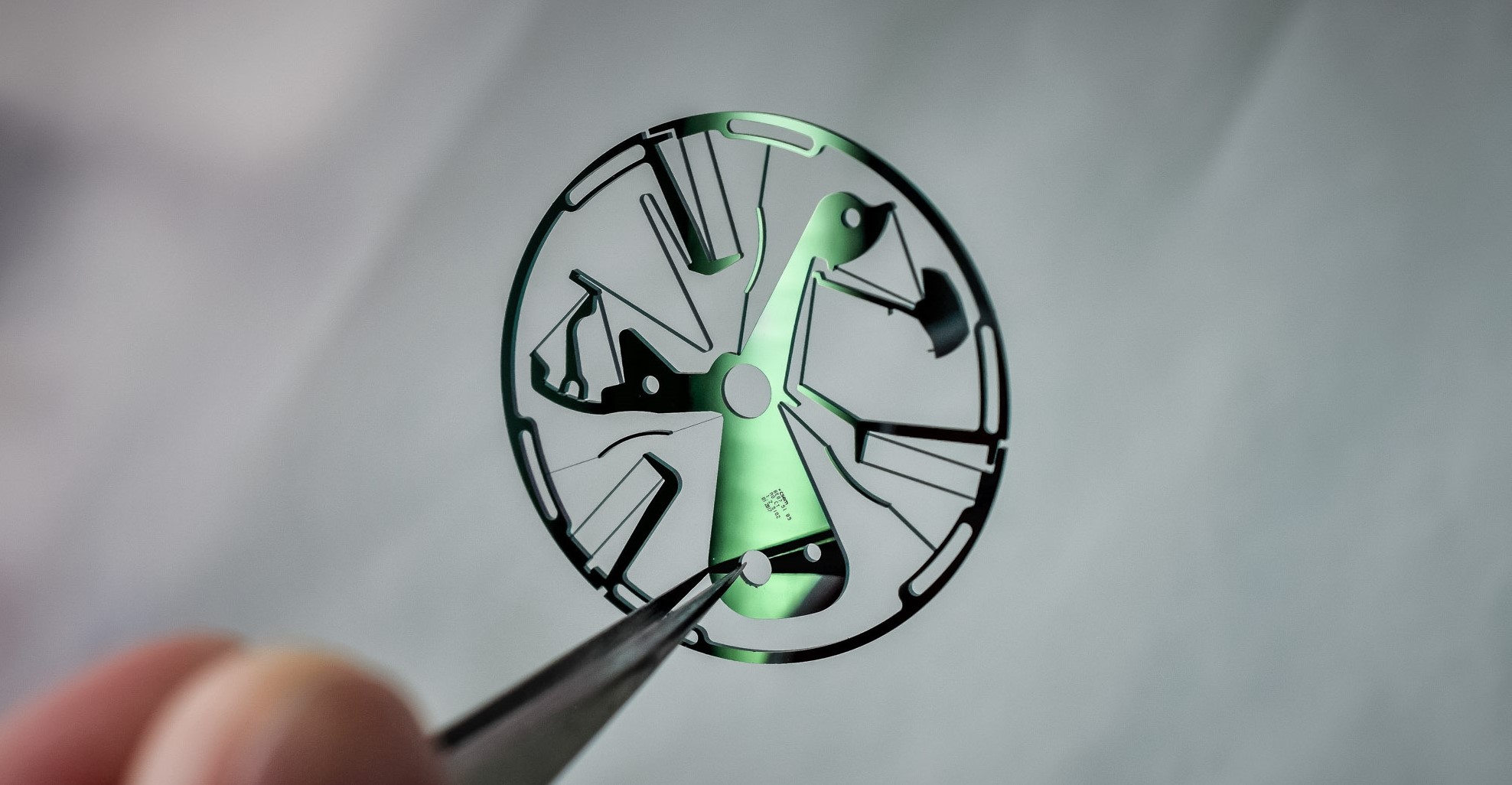
Componente con segmenti flessibili appartenente ad un orologio di lusso.
Vantaggi
I compliant mechanisms (che per brevità nel resto dell’articolo chiameremo CM) hanno indubbi vantaggi sul piano realizzativo:
- Non avendo bisogno di giunzioni o molle, riducono drasticamente il numero di componenti necessario per la loro costruzione, minimizzando i costi di produzione.
- Nella maggior parte dei casi i CM si prestano a diversi metodi realizzativi, come gli stampi per singoli pezzi, l’estrusione, il taglio laser o la stampa 3D.
- Sempre grazie all’assenza di giunti, non necessitano di lubrificanti (caratteristica utile soprattutto per gli oggetti in volo nello spazio, dove i lubrificanti tendono a evaporare) e non dissipano energia in attriti, perfezionando l’efficienza della trasmissione di forze.
- Il peso, parametro importante per alcuni tipi di applicazioni, viene a ridursi sempre grazie alla semplificazione strutturale.
- I CM sono estremamente scalabili fino a livelli nanometrici: ciò li rende molto utili in tutti quei campi applicativi dove giunti così minuti non potrebbero essere costruiti in modo semplice.
Criticità
Le criticità dei CM sono legate alla difficoltà di progetto, alla vita dei componenti e a limiti fisici che questo tipo di tecnologia possiede.
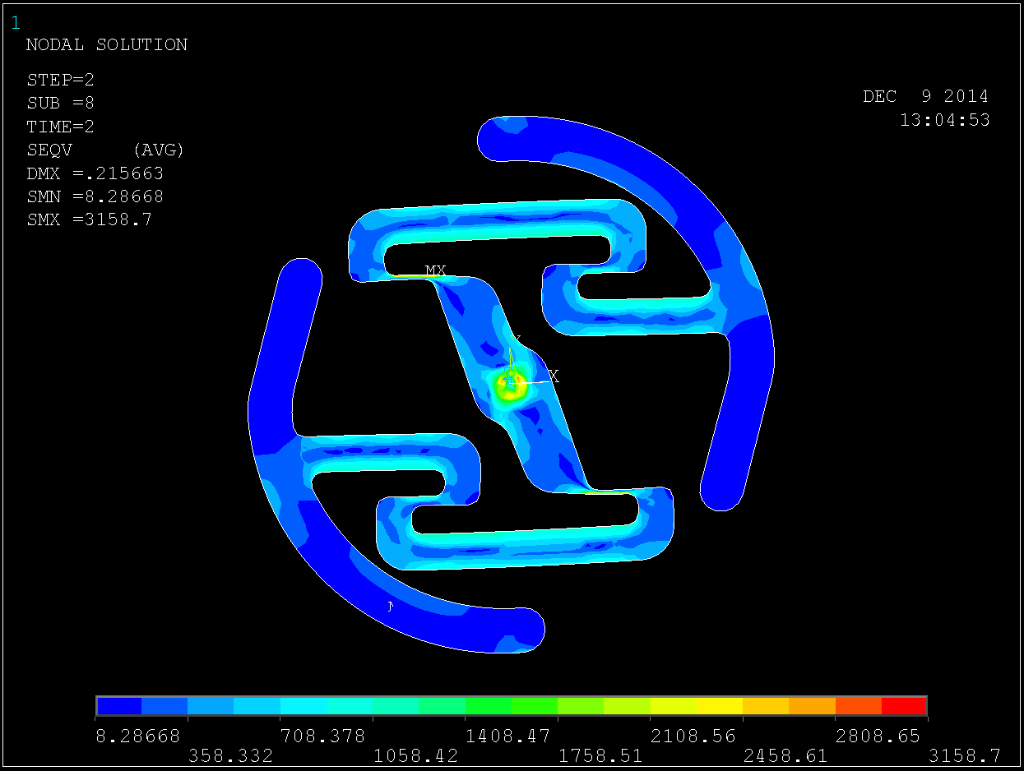
- Le simulazioni devono verificare che non venga accumulata energia nel dispositivo durante la trasmissione (la quale altrimenti calerebbe in rendimento andando ad annullare l’effetto benefico dell’assenza di attriti).
- Si devono progettare componenti che non siano eccessivamente sollecitate nei punti critici, in modo da garantire una durata di vita sufficiente. Spesso i sistemi sono molto complessi da risolvere, poiché in genere presentano equazioni non lineari. Come vedremo nel paragrafo successivo, ci si deve quasi sempre accontentare di modelli risolutivi approssimati.
- A causa del punto precedente e della natura della flessione in campo elastico, i CM hanno un range di flessione limitato. Se ne deduce come conseguenza che i CM non possono trasmettere rotazioni complete o quasi complete, a meno che non si faccia uso di materiali molto costosi o non si usi molto materiale (in modo da distribuire la flessione su un volume ampio).
Progettare i CM
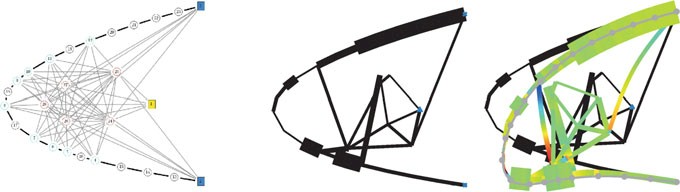
Nei primi anni in cui questi meccanismi si sono diffusi, si è provato a progettare nuovi oggetti usando metodi trial-and-error, che ovviamente comportano tempi lunghi e costi più elevati. Ultimamente si è invece cercato di generalizzare per quanto possibile i criteri di progettazione, in modo da costruire conoscenze di base utili per più progetti. In diversi casi è applicabile il modello di corpo pseudo-rigido, che prevede di approssimare tutte le componenti sotto flessione a segmenti rigidi collegati da molle.
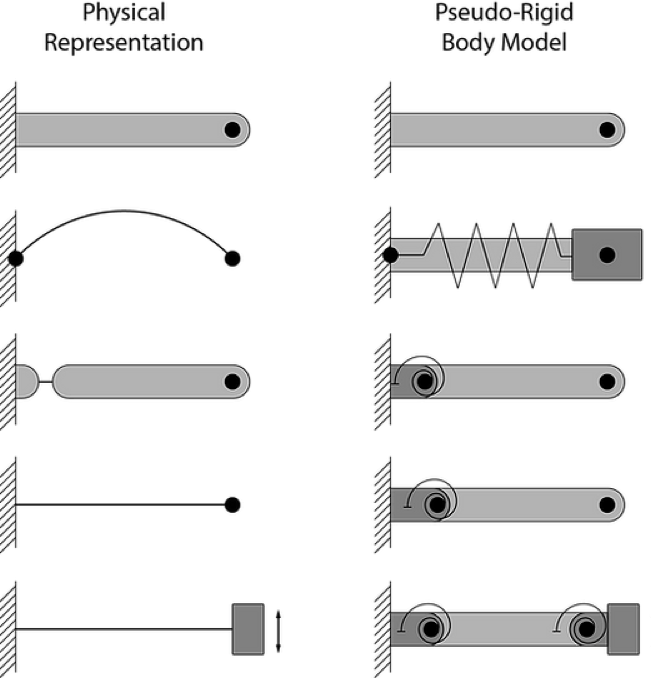
Modelli fisici di uso frequente e rispettivi modelli di corpo pseudo-rigido approssimati.
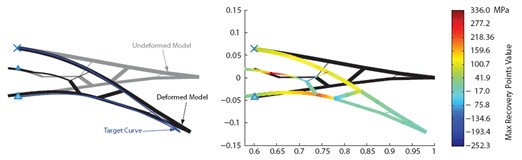
L’idea è descrivere la complessità tridimensionale del sistema coi soli coefficienti delle singole molle. Ogni coefficiente infatti è esprimibile come una funzione dell’angolo di inclinazione del giunto di riferimento; scegliendo dunque la funzione che descrive meglio la situazione fisica che la molla approssima, si può “personalizzare” il coefficiente in modo da renderlo coerente col comportamento della struttura originale. L’approssimazione è utilizzata solo ai fini pratici per comprendere le interazioni tra più componenti in un progetto specifico.
Deformazione diffusa e localizzata
Le componenti dei meccanismi cedevoli si possono dividere in meccanismi a deformazione diffusa e meccanismi a deformazione localizzata. I primi portano a deformazione gran parte della loro struttura. I secondi confinano invece le zone di deformazione a punti molto specifici della struttura; in questo modo l’uso delle equazioni non lineari viene limitato a poche zone del corpo, permettendo analisi progettuali più vicine al mondo dei meccanismi rigidi. Il modello di corpo pseudo-rigido può essere applicato a entrambe le tipologie di meccanismi, ma acquisisce gradi di approssimazione migliori con le deformazioni localizzate, che per questo motivo sono le più studiate e utilizzate al momento.
Sistemi bistabili
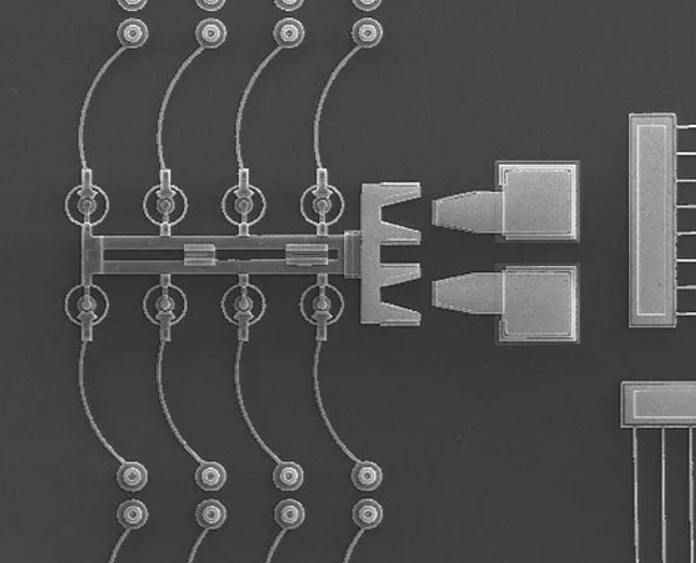
Un campo progettuale in cui i CM hanno riscosso successo è quello dei sistemi bistabili. In generale, un sistema bistabile in meccanica dei solidi è una struttura in grado di acquisire uno stato di equilibrio stabile in due conformazioni differenti. Per mutare configurazione, i tradizionali sistemi bistabili devono necessariamente o appoggiarsi a una struttura ausiliaria o fare uso di denti e molle; nei CM, invece, è possibile progettare un unico pezzo che, dato un certo quantitativo di forza esterna imposta, sia in grado di trasformare il suo equilibrio stabile in equilibrio instabile per mutare configurazione quando richiesto. Semplici sistemi bistabili monocomponenti possono essere, per esempio, degli interruttori, come mostrato nelle immagini qui sotto.

Questo modello di switch è molto comune nel mondo della micromeccanica di precisione.
Applicazioni
Una volta visti i princìpi alla base della progettazione dei CM, possiamo soffermarci su alcune applicazioni che questa tecnologia ha avuto nei recenti sviluppi.
- Robotica e biomeccanica: con la combinazione di motori elettrici e di strutture flessibili si possono creare sistemi di movimento vicini per concezione agli apparati motori degli esseri viventi. Un grande aiuto per i futuri step da compiere sul piano teorico e progettuale potrebbe arrivare proprio dall’analisi e dalla replicazione di alcuni sistemi presenti in natura. L’uso della flessibilità nella robotica sta generando svariate tipologie di nuovi robot che hanno cambiato e cambieranno il modo in cui queste macchine saranno capaci di interagire col mondo e con l’uomo.
I meccanismi cedevoli sono stati anche utilizzati dagli animatori Disney come base di studio per comprendere e rappresentare al meglio i movimenti muscolari.
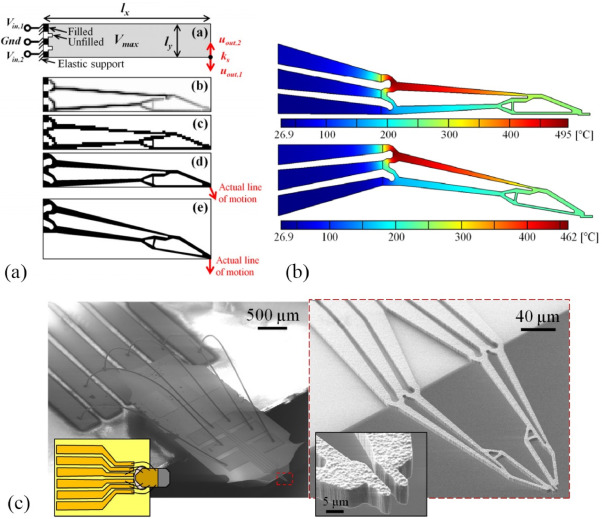
- Microsistemi elettro-meccanici: come già accennato, i CM possono essere progettati anche su scale molto piccole. Microsensori, microinterruttori, microattuatori e decine di altri dispositivi con dimensioni misurabili in micron classificabili sotto l’acronimo MEMS hanno già trovato impiego in numerosi ambiti, dall’elettronica delle microonde alla meccanica di precisione. Moltissimi MEMS fanno ampio uso di parti meccaniche flessibili, che garantiscono un livello di precisione difficilmente raggiungibile con meccanismi di altro tipo. Recentemente si sta anche lavorando sulla scala dei nanometri con risultati molto promettenti.

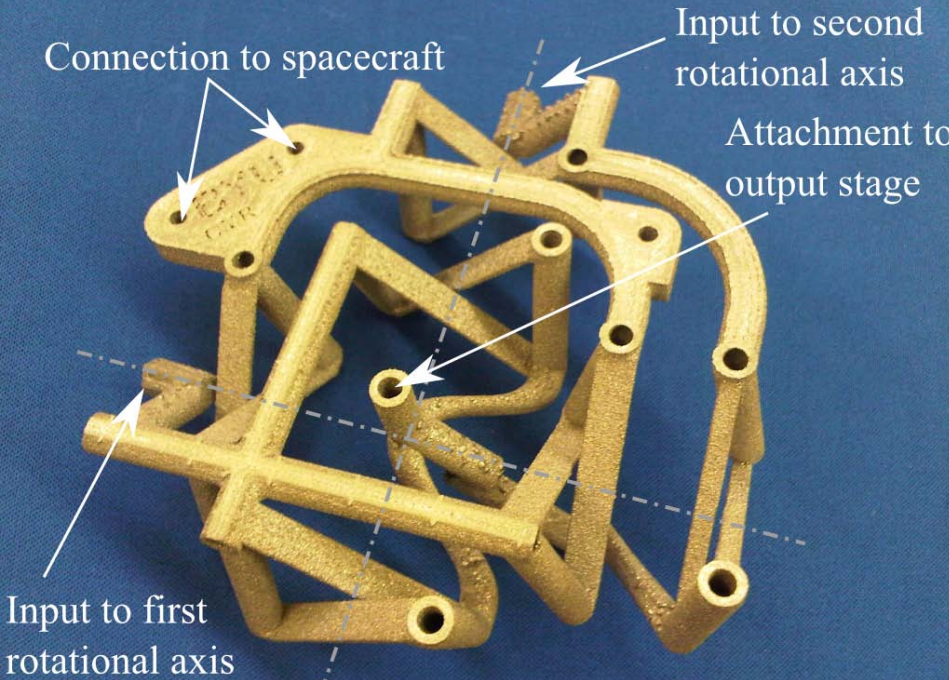
- Sistemi interamente flessibili: sebbene la progettazione di questo tipo di meccanismi sia particolarmente complessa, ci sono già stati alcuni tentativi di applicare le conoscenze finora in nostro possesso. Qui sotto si può osservare un meccanismo progettato dalla Nasa in grado di direzionare con precisione l’ugello di un razzo trasmettendo la torsione imposta da due semplici motori elettrici (uno per ogni asse rotazionale).
- Sistemi pieghevoli: è possibile anche sfruttare la flessibilità per costruire sistemi in grado di dispiegarsi e ripiegarsi su sé stessi sotto forze imposte. Utilizzando gruppi di pieghe (simili a quelle degli origami) o sistemi che sfruttano la flessione diffusa si possono risparmiare notevoli quantità di peso e di volume durante il trasporto di oggetti. Rimanendo sempre in ambito spaziale, per esempio, si è ipotizzato di utilizzare pannelli solari pieghevoli su alcuni satelliti futuri.
- Altre applicazioni: essendo quello dei CM un mondo dai confini ancora non definiti, si sta provando ad applicare questa tecnologia in diversi altri ambiti. Essendo facilmente stampabili in 3D a basso costo, i meccanismi cedevoli si prestano a usi rapidi nei laboratori manifatturieri che, anziché comprare attrezzi costosi, possono fabbricarne di propri personalizzati all’occorrenza (se ne vede un esempio nell’immagine sottostante). Altri esempi degni di nota sono l’impiego dei CM nei meccanismi di alcuni orologi, in un sistema di freni a tamburo di nuova concezione e nei design delle future generazioni di ali per aeromobili (in ordine nelle immagini seguenti).
Sezioni flessibili di coda e bordo d’attacco di un’ala d’aereo progettata dalla Nasa.
I compliant mechanisms sono il futuro?
Non sempre i meccanismi cedevoli possono portare dei reali vantaggi rispetto ai meccanismi tradizionali, ma sicuramente le applicazioni ancora non esplorate sono moltissime. Le moderne intelligenze artificiali hanno già dimostrato di poter gestire la progettazione dei CM realizzando strutture elaborate; tuttavia, poiché i fenomeni fisici che hanno luogo in un CM sono governati da equazioni fortemente non lineari, per ora non si ha un’idea chiara delle potenzialità che questi strumenti potrebbero avere. Il successo dei compliant mechanisms dipenderà da quanto si sarà in grado di ampliare le basi teoriche che governano questa tecnologia.
Fonti
- BYU – Compliant Mechanisms Research
- Progettista Industriale
- International Journal of Mechanical and Production Engineering R&D