Il momento angolare
Cos’è, come funziona e come varia nel tempo
Più correttamente chiamato momento della quantità di moto
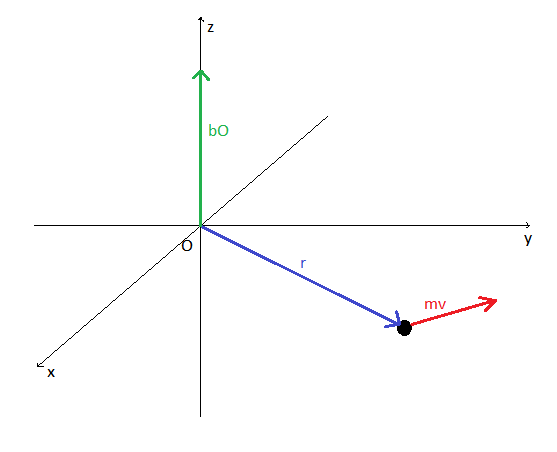
In fisica si chiama momento della quantità di moto (chiamato anche momento angolare o impulso angolare dalla traduzione del rispettivo termine inglese angular momentum) una grandezza fisica che si definisce nel seguente modo:

dove si indicano con b zero il momento angolare rispetto al polo O, con r il vettore posizione della particella di massa m vettore rispetto al polo O e con p vettore la quantità di moto della particella considerata, essendo:![]()
La (1) si può riscrivere in questo modo:

In realtà la definizione appena esposta non è rigorosa, in quanto partendo dalle equazioni della cinematica la velocità di un corpo nel piano viene espressa secondo la relazione![]()
che significa che la velocità di un punto si esprime come somma della velocità del punto rispetto al quale lo si guarda e della rotazione attorno ad esso. Si capisce come l’espressione (2) si possa complicare ulteriormente. Inoltre c’è anche da distinguere se A e B si trovano sullo stesso corpo, ma non ci dilungheremo oltre. Per alleggerire la discussione, ed arrivare più facilmente allo scopo di questo articolo, si è considerato che il corpo di cui si sta analizzando il momento angolare sia in rotazione attorno ad un asse baricentrico fisso e che O si trovi su detto asse.
La (2) vale per una singola particella. Per un corpo costituito da un insieme di particelle di massa m o corpo continuo si può enunciare la definizione di momento della quantità di moto in questa forma:

dove si è introdotto il tensore (o più semplicemente, in questa sede, matrice) momento d’inerzia rispetto al polo O; si può informalmente dire quindi che il momento angolare è l’analogo della quantità di moto per un corpo che sia in rotazione attorno al punto O.
Una considerazione da fare è che il momento d’inerzia è una proprietà indipendente dal polo di riduzione O, cioè non cambia i suoi valori con il particolare punto attorno al quale le rotazioni sono considerate. Il momento d’inerzia si presenta come segue:
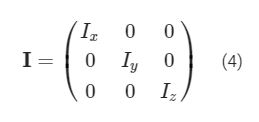
se si scrive (4) con riferimento agli assi principali} del corpo considerato. Quindi i valori del momento d’inerzia cambiano con l’asse considerato, ma sono gli stessi per tutti i punti su quegli assi. La forma più generale è la seguente:
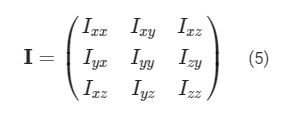
Siccome è sempre possibile diagonalizzare il tensore d’inerzia portandolo nella forma (4), la (5) non verrà utilizzata in seguito.
Le prime proprietà di conservazione
E’ possibile fare subito una considerazione sulla quantità espressa da (3). Supponiamo di avere un corpo che ruota unicamente attorno all’asse z, quindi l’unica velocità angolare sarà omega e il momento angolare ![]()
Osservando bene l’equazione scritta, si può trovare una spiegazione a quello che possiamo chiamare effetto pattinatore. L’esempio è particolarmente adatto in quanto il basso attrito tra ghiaccio e lama del pattino ci permette di trascurare il suo effetto e ragionare meglio sulla conservazione di ![]()
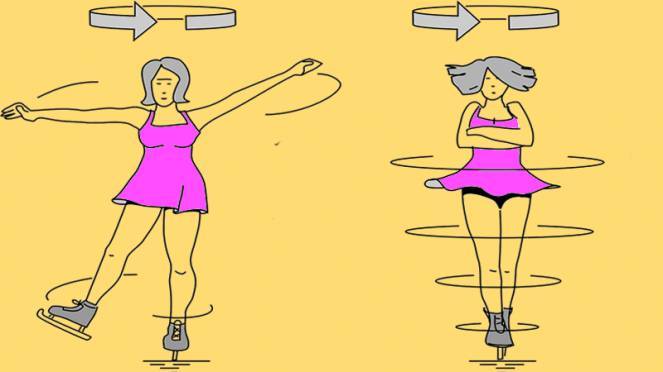
Quando il pattinatore inizia a ruotare attorno al suo “asse z” con una velocità omega, si vede che allontanando le gambe o le braccia da detto asse la sua velocità si riduce. Al contrario, quando si piega verso il basso e avvicina le braccia al busto la velocità aumenta.
Questo non è casuale: ricordando la definizione di momento d’inerzia da (3), si capisce che allontanare le braccia corrisponde ad aumentare vec{r^{2} e quindi I (in prima approssimazione).
Un’altra proprietà interessante riguarda la “vettorialità” del momento angolare, e prenderemo come esempio il sistema in figura sotto (che è un classico esperimento mostrato nelle scuole).
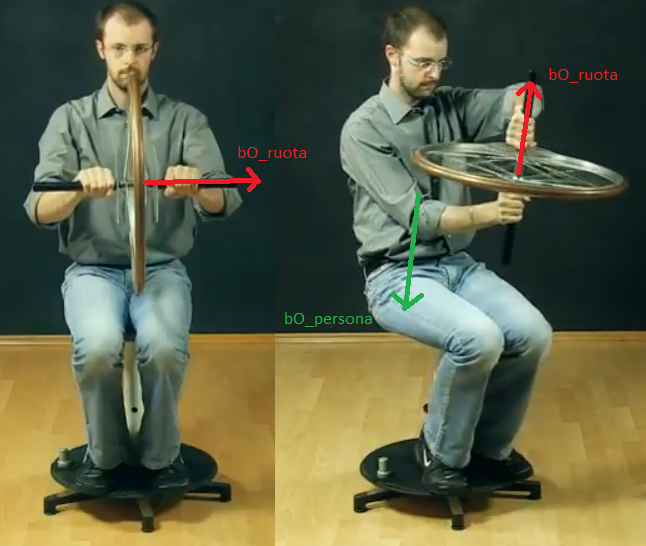
Partendo dalla situazione iniziale di ω vettore diretta come un asse ortogonale all’asse della persona seduta z, la quale può ruotare esclusivamente attorno a quest’ultimo asse, si vede che il sistema è fermo, in quanto il prodotto vettoriale Iω è nullo.
Se ora la persona fa allineare il vettore ω con l’asse z, questa si metterà a ruotare in direzione opposta alla direzione di rotazione della ruota. Questo è l’unico risultato possibile: dal momento che all’istante iniziale il momento angolare era nullo, questo si deve verificare anche in questa circostanza, e dunque la persona “si mette” in moto rotatorio di verso opposto di modo che:

Momento angolare e coppie applicate
Finora abbiamo visto alcuni esempi di variazione del momento angolare non dipendenti dal tempo. Più interessanti risultano però queste ultime. Per comprenderle sono necessarie altre considerazioni che svilupperemo nel seguito.
Sempre nell’ipotesi che il polo O sia fermo, richiamiamo la seconda equazione cardinale della meccanica:
che ci dice che la variazione di momento angolare nel tempo è pari al momento delle forze calcolato rispetto allo stesso polo. Da questa possiamo fare un’importante considerazione: si vede infatti che vale la seguente:
cioè la variazione dell’impulso angolare è parallela alla direzione del momento delle forze, che ricordiamo essere esprimibile in questo modo:
Si può allora arrivare alla somma vettoriale sotto esposta che ci permette di dire che il vettore momento della quantità di moto al tempo t+dt può essere calcolato come somma del vettore al tempo t e del momento delle forze, moltiplicate per l’incremento temporale dt, avendo utilizzato la definizione di derivata.

Quindi è chiaro come l’applicazione di un momento di forze possa influenzare la direzione di rotazione di un corpo.
Questo ha dei risvolti pratici interessanti, come esposto negli esempi seguenti.
La precessione
Il fenomeno di precessione caratterizza tutti quei corpi ruotanti attorno ad un asse sui quali viene applicato un momento di forze. Sistemi su cui questo fenomeno è chiaramente visibile sono il giroscopio e il classico esempio della ruota di bicicletta.
Entrambi si basano sullo stesso principio: applicata una coppia grazie all’azione della forza di gravità, la ruota (ad esempio) non cade, ma inizia a ruotare oltre che intorno al proprio asse intorno all’asse su cui è incernierata (vedi la figura sotto).
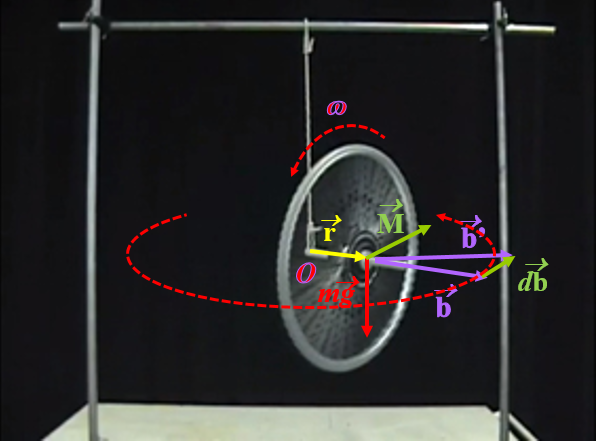
Noto quindi il vettore ![]() è semplice calcolare quale effetto avrà l’applicazione di un momento al corpo in rotazione.
è semplice calcolare quale effetto avrà l’applicazione di un momento al corpo in rotazione.
Questo principio viene anche utilizzato in ambito sportivo, come vedremo nel prossimo paragrafo.
La piega della moto
Chi utilizza la bicicletta sa che per affrontare una curva si deve sterzare girando il manubrio. Intuitivamente, però, ci si inclina anche leggermente nella direzione nella quale si vuole compiere la curva. In definitiva per compiere una curva con una bicicletta è necessaria una sinergia, un effetto combinato di sterzata e piega.
Quando le velocità di percorrenza diventano più elevate, ad esempio con la guida di una moto sportiva, è normale percorrere le curve in piega, molto spesso senza il bisogno di girare lo sterzo.
Si capisce quindi che la guida di veicoli a due ruote si basa sul principio di conservazione del momento della quantità di moto.
Questo fatto non ci deve sorprendere: quando le ruote della moto girano ad alta velocità fanno sì che la moto sia dotata di un momento angolare somma di quelli delle due ruote.

Come si vede dalla figura sopra, quando il pilota piega provoca un momento dovuto alla sua forza peso sul sistema moto-pilota: dovendosi conservare il momento angolare che c’era sul rettilineo anche in curva, il risultato è che detto momento angolare cambia direzione e la moto cambia direzione. Occorre ignorare qualsiasi accelerazione tangenziale della moto, supponendo che il pilota percorra la curva con velocità di percorrenza costante.
Altri piloti amplificano l’effetto dovuto alla piega “appendendosi” alla moto. Così facendo, il braccio r vettore tra baricentro della moto e l’angolo tra braccio e forza peso – il modulo del momento si scrive ![]() del pilota aumenta andando ad incrementare il momento della forza peso ed, in generale, l’effetto sterzante.
del pilota aumenta andando ad incrementare il momento della forza peso ed, in generale, l’effetto sterzante.

Alcune precisazioni
C’è da dire che l’effetto di aumento della velocità di percorrenza non è dato soltanto dalla piega, ma anche dall’aumento della superficie di contatto tra pneumatico e asfalto, che assicura una maggiore presa e una maggiore forza scambiata. Questi effetti consentono al pilota di affrontare le curve in maggiore sicurezza (in termini di competizione) e quindi portare la moto in uscita di curva con uno spunto migliore.
In questa sede si è però approfondito il solo momento della quantità di moto, lasciando ad altri articoli e/o pubblicazioni la spiegazione di meccaniche del veicolo/motoveicolo.
E’ importante comprendere che sui veicoli a quattro ruote non si verificano effetti giroscopici, in quanto le ruote di un lato equilibrano il momento angolare delle ruote dell’altro lato.